
Метод CFCE
Данная статья посвящена методу CFCE (Cross-F2L-Corners-Edges) сборки кубика Рубика. Появился он примерно в то же время, что и CFOP, то есть в 80-х годах, но не настолько распространен по непонятным причинам, ведь он при чуть меньшем количестве формул (71 у CFCE против 78 у CFOP) позволяет собирать за такое же время. И дополнение: при дальнейшем изучении можно достигнуть меньшего количества этапов, но об этом позже.
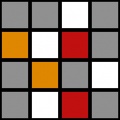
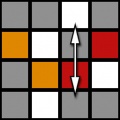
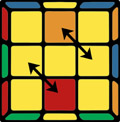
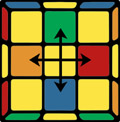
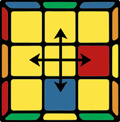
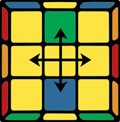
Итак, суть метода. Первые два слоя собираем, как можем. Но лучше, чтобы вы уже знали F2L, это подразумевает само название метода. Дальше мы смотрим на цвета наклеек углов. Причем даже не на сами цвета, а на их расположение (берем стандартную расцветку) друг относительно друга. Изучая CLL (Corners of the Last Layer, 42 формулы) для 3х3х3, надо понимать, что каждый алгоритм описывает алгоритм CLL, а не отдельный случай. То есть, может быть такое, что на картинке задняя сторона синяя, а у вас оранжевая, но формула та, которая вам нужна. Для чего это говорилось: запоминайте не цвета картинок, а взаимное расположение наклеек, рисуйте в голове прямые линии, диагонали, тут у каждого свой метод.
Как проще запомнить: разбейте задачу на этапы, например, по расположению жёлтых наклеек («глаза», «уши», три по часовой стрелке и т. д.).
И будет вам счастье.
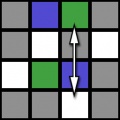
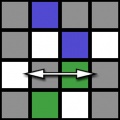
Переходим к ELL (Edges Last Layer, 29 формул). Тут также несколько групп, то есть группы алгоритмов уже есть. Учите алгоритмы согласно этому разбиению, помните, что, как и в CLL, каждый алгоритм описывает много случаев и будет вам счастье.
А, точно, чуть не забыл об обещанном рассказе о достижении меньшего количества этапов. Смотрите, ситуация: у вас есть крест на верхней стороне. Вы делаете CLL алгоритм, но не обычный, а специальный и все ребра будут правильно ориентированы, а углы — стоять на своих местах. Останется только расставить ребра на свои места, а тут расклад следующий: с вероятностью 1/12 у вас они уже расставлены и сборка завершена (PLL-skip); с вероятностью 1/12 надо поменять противоположные ребра (H-perm), 1/6 — по два соседних ребра (Z-perm) и 2/3 — прогнать ребра по треугольнику (Ua-perm, Ub-perm). Зачем все это? Затем, что вышеупомянутые формулы очень просты и это вам сэкономит время.
Думаю, я нормально описал это замечательный метод и его усовершенствование, которые позволят вам достигнуть среднего времени < 10 секунд. CLL выучились быстро, с ELL было чуть труднее, несмотря на меньшее количество формул.
Удачи в изучении!
Анатолий Калинин (Artificial на cubing.com.ua)
Использованы материалы сайта speedsolving.com.
CLL (42 формулы)
Примечание: на картинках не изображены ребра по причине ненадобности.
| Картинка | Обозначение | Комментарий | Алгоритм |
| Группа алгоритмов «глаза» | |||
 |
U U | Только ориентация | (y) R U2 R’ U’ R U’ R’ L’ U2 L U L’ U L |
 |
U D | Самая простая формула | (y’) F R U R’ U’ F’ |
 |
U R | Зеркально U L, обратно L L | (y2) R2 D R’ U2 R D’ R’ U2 R’ |
 |
U F | Зеркально самому себе, обратно T F | R2 F2 R’ B2 R F2 R’ B2 R’ |
 |
U L | Зеркально U R, обратно L F | (y2) L2 D’ L U2 L’ D L U2 L R2′ D’ R U2 R’ D R U2 R |
 |
U B | Зеркально и обратно самому себе | (y) Rw’ (y’) R’ U2 L’ U R U’ L U2 (y) Rw |
| Группа алгоритмов «уши» | |||
 |
T U | Обратно U U | (y’) R U R’ U R U2 R’ L’ U’ L U’ L’ U2 L |
 |
T D | Зеркально и обратно самому себе | (y2) F2 L2 F’ R U R’ U’ F L2 F2 |
 |
T R | Зеркально T L, обратно L R | (y) L’ U’ L U L F’ L’ F |
 |
T F | Зеркально самому себе, обратно U F | (y’) Lw’ U2 R’ D2 R U2 R’ D2 R2 (x’) |
 |
T L | Зеркально T R, обратно L L | (y’) R U R’ U’ R’ F R F’ |
 |
T B | Зеркально и обратно самому себе | R’ U R U2 L’ R’ U R U’ L |
| Группа алгоритмов «восьмёрка» | |||
 |
L U | Только ориентация | (y’) R U R’ U R U’ R’ U R U’ R’ U R U2 R’ |
 |
L D | Обратный и зеркальный самому себе | (y) R U2 R2 F R F’ R U2 R’ |
 |
L R | Зеркально L B, обратно T R | (x’) U’ R U L’ U’ R’ U Rw |
 |
L F | Зеркально L L, обратно U L | (y2) L’ U2 L’ D’ L U2 L’ D L2 |
 |
L L | Зеркально L F, обратно U R | (y) R U2 R D R’ U2 R D’ R2 |
 |
L B | Зеркально L R, обратно T L | (y’ x’) U L’ U’ R U L U’ Lw’ |
| Группа алгоритмов «три по» | |||
 |
S U | Только ориентация, зеркально и обратно -S U | (y’) R U R’ U R U2 R’ |
 |
S D | Зеркально и обратно -S D | (y) R U R’ U L’ U R U’ L U2 R’ |
 |
S R | Зеркально -S F, обратно -S R | (y’) L’ U2 L U2 L F’ L’ F |
 |
S F | Зеркально -S R, обратно -S F | (y’) F R’ F’ R U2 R U2 R’ |
 |
S L | Обратно и зеркально -S B | (x’) U L’ F2 L U’ L’ U F2 U’ Rw |
 |
S B | Обратно и зеркально -S L | (y’) R U’ L’ U R’ U’ L |
| Группа алгоритмов «три против» | |||
 |
-S U | Только ориентация. Зеркально и обратно S U | (y2) L’ U’ L U’ L’ U2 L |
 |
-S D | Зеркально и обратно S D | L’ U’ L U’ R U’ L’ U R’ U2 L |
 |
-S R | Зеркально S F, обратно S R | (y2) F’ L F L’ U2 L’ U2 L |
 |
-S F | Зеркально S R, обратно S F | (y2) R U2 R’ U2 R’ F R F’ |
 |
-S L | Зеркально и обратно S B | R’ U L U’ R U L’ |
 |
-S B | Зеркально и обратно S L | L’ B U2 B’ L B L’ U2 L B’ |
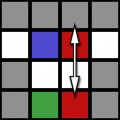
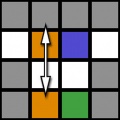
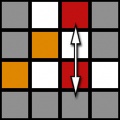
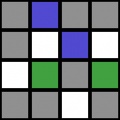
| Группа алгоритмов «машина» | |||
 |
H U | Только ориентация | R U2 R’ U’ R U R’ U’ R U’ R’ |
 |
H D | Обратный и зеркальный самому себе | F R U R’ U’ R U R’ U’ R U R’ U’ F’ |
 |
H R | Зеркально Pi B | (y’) R U2 R2 F R F’ U2 R’ F R F’ |
 |
H F | Обратно Pi F | R’ F R F’ U2 R2 B’ R’ B R’ |
| Группа алгоритмов «вертолёт» | |||
 |
Pi U | Только ориентация | (y) F R U R’ U’ R U R’ U’ F’ |
 |
Pi D | Зеркальный и обратный самому себе | (y’) R’ U’ R U’ R’ U F’ U F R |
 |
Pi R | Зеркальный и обратный Pi L | (y) R U2 R’ U’ R U R’ U2 R’ F R F’ |
 |
Pi F | Обратно H F | (y) R B’ R B R2 U2 F R’ F’ R |
 |
Pi L | Зеркальный и обратный Pi R | (y’) L’ U2 L U L’ U’ L U2 L F’ L’ F |
 |
Pi B | Обратный к H R | (y’) F R’ F’ R U2 F R’ F’ R2 U2 R’ |
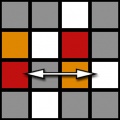
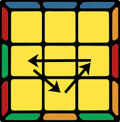
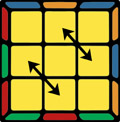
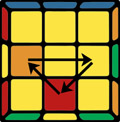
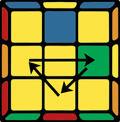
Смена двух ориентированных углов, находящихся справа: R U R’ F’ R U R’ U’ R’ F R2 U’ R’ U’
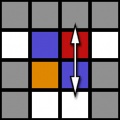
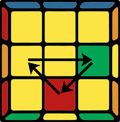
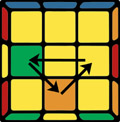
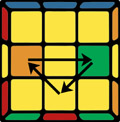
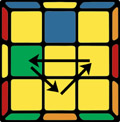
Смена двух ориентированных углов по диагонали: F R U’ R’ U’ R U R’ F’ R U R’ U’ R’ F R F’
ELL (29 формул)
| Картинка | Обозначение | Алгоритм | |
| Случаи ориентации ребер (Pure flips) | |||
.jpg) |
Pure adjacent 2-flip | Rw U R’ U’ Rw’ U2 R U R U’ R2 U2 R | |
.jpg) |
Pure opposite 2-flip | M’ U M’ U M’ U2 M U M U M U2 | |
 |
Pure 4-flip | M’ U2 M U2 M’ U’ M U2 M’ U2 M U | |
| Случаи ориентированных ребер (EPLL) | |||
 |
U-PLL a | M2 U’ M U2 M’ U’ M2 L’ U L’ U’ L’ U’ L’ U L U L2 |
|
 |
U-PLL b | M2 U M U2 M’ U M2 R U’ R U R U R U’ R’ U’ R2 |
|
 |
Z-PLL | M’ U M2 U M2 U M’ U2 M2 | |
 |
H-PLL | M2 U M2 U2 M2 U M2 | |
| Заднее ребро собрано | |||
 |
RF-flip U-PLL a | (y2) M’ U M U2 M’ U M | |
 |
LF-flip U-PLL b | (y2) M’ U’ M U2 M’ U’ M | |
 |
RL-flip U-PLL a | (y’) Rw’ U’ R U M’ U’ R’ U R | |
 |
RL-flip U-PLL b | (y’) Rw U R’ U’ M U R U’ R’ | |
 |
LF-flip U-PLL a | (y’) R U R’ U’ M’ U R U’ Rw’ | |
 |
RF-flip U-PLL b | (y’) R’ U’ R U M U’ R’ U Rw | |
| Заднее ребро на месте, но перевернуто | |||
 |
4-flip U-PLL a | (y2) (Fw R U R’ U’ Fw’) (R’ U’ R’ F R F’ U R) | |
 |
4-flip U-PLL b | (y2) (Fw’ L’ U’ L U Fw) (L U L F’ L’ F U’ L’) | |
 |
BF-flip U-PLL a | M’ U’ M’ U2 M’ U M U’ M’ U2 M U M2 | |
 |
BF-flip U-PLL b | M’ U M’ U2 M’ U’ M U M’ U2 M U’ M2 | |
 |
BL-flip U-PLL a | M2 U M’ U2 M U’ M’ U M U2 M U’ M | |
 |
BR-flip U-PLL b | M2 U’ M’ U2 M U M’ U’ M U2 M U M | |
 |
BR-flip U-PLL a | (y2) M’ U’ M2 U’ M U2 M’ U’ M’ | |
 |
BL-flip U-PLL b | (y2) M’ U M2 U M U2 M’ U M’ U’ | |
| Нету ребер на своих местах | |||
 |
LF-flip Z-PLL | (y2) Fw R U R’ U’ Fw2 z U’ R’ U R B | |
 |
LB-flip Z-PLL | (y2) F R U R’ U’ F’ R’ U’ R’ F R F’ U R | |
 |
FB-flip Z-PLL | M’ U M U’ M’ U M U M’ U2 M | |
 |
LR-flip Z-PLL | (y) M’ U’ M U M’ U’ M U’ M’ U2 M | |
 |
4-flip Z-PLL | Rw’ Uw M2 Uw’ Rw U2 Rw’ Uw M2 Uw’ Rw U2 | |
 |
4-flip H-PLL | Rw’ R U (R U R’ U’) M2 U R U’ Rw’ | |
 |
FR-flip H-PLL | M’ U’ M U’ M’ U’ M U’ M’ U’ M U | |
 |
FB-flip H-PLL | F M’ F U M2 U2 M2 U F’ M F’ | |